Vision for Robotics Lab (V4RL) @ UCY
Prof. Dr. Margarita Chli has taken up a professorship at the University of Cyprus, retaining her affiliation with ETH Zurich, and continues to be the director of the Vision for Robotics Lab (V4RL).

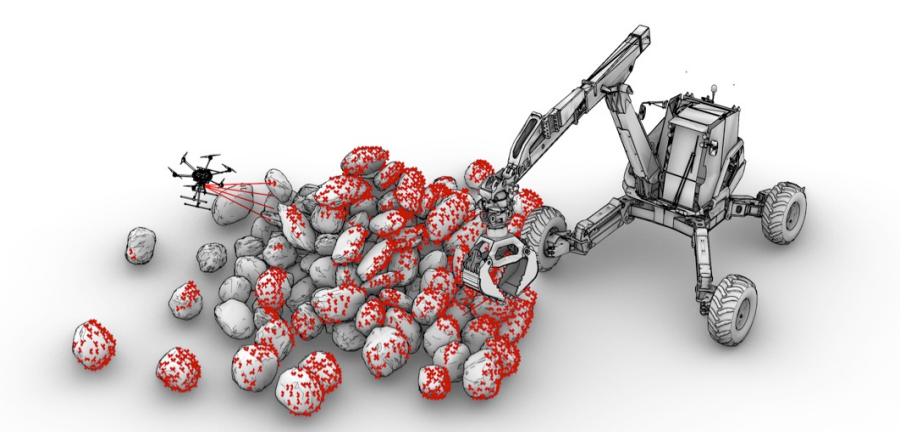
Our focus is on robotic vision-based perception. We work with small Unmanned Aerial Vehicles (UAVs) in particular, as they are some of the most challenging robotic platforms, however, our research can be applied on any robot in need of perceiving its motion and/or workspace.
V4RL




Follow us on external pageTwitter.
Subscribe to our external pageYouTube Channel for all latest videos by the V4RL team.
Check out our latest publications!
We frequently release our datasets & code.